沈阳诺德尔自动化科技有限公司
Shenyang Ndeer Automation Technology Co., Ltd
Shenyang Ndeer Automation Technology Co., Ltd

联系人:谢经理
手 机:18640057795(v同步)
邮 箱:xs@syndeer.com
地 址:http://www.ndeeryy.com
网 址:沈阳市沈河区长青街35号
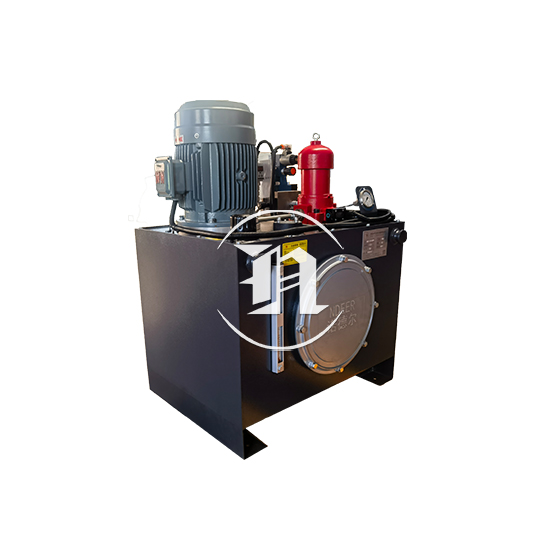
陆上风力发电机组液压系统的工作原理基于液压传动技术,通过密闭管路中的压力油液传递能量,实现对机组关键部件(如变桨机构、偏航系统、制动装置等)的动力驱动和精准控制。其核心逻辑是 “机械能→液压能→机械能” 的能量转换与传递,具体过程可按功能模块拆解如下:
一、核心能量转换流程
能量输入:机械能转液压能
液压系统的动力元件(如齿轮泵、柱塞泵)由电机驱动,通过旋转叶片或柱塞的运动,将电机的机械能转化为油液的压力能(即压力和流量)。此时,油液在泵的作用下被加压,形成具有一定压力的高压油,通过管路输送至系统各执行元件。
能量传递:液压能的定向输送
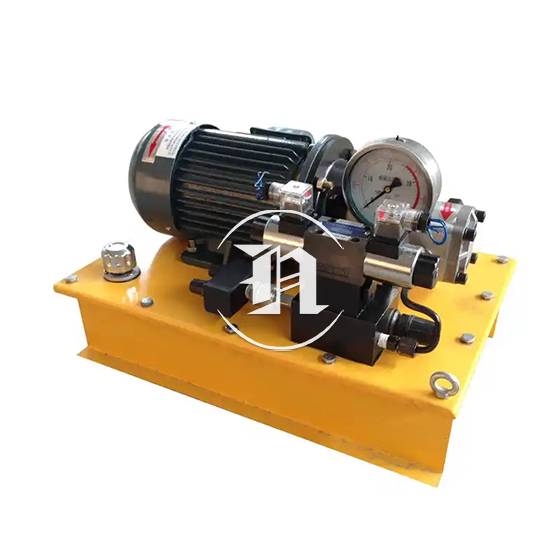
高压油通过管路流经控制元件(如电磁换向阀、比例阀、溢流阀等),这些元件通过调节油液的压力、流量和方向,实现对能量传递的精准控制。例如:
换向阀控制油液流向,决定执行元件(油缸、液压马达)的动作方向(如伸 / 缩、正转 / 反转);
比例阀根据电信号(如控制器的指令)调节流量,控制执行元件的动作速度;
溢流阀设定系统最高压力,防止压力过高损坏元件,起到安全保护作用。
能量输出:液压能转机械能
高压油最终进入执行元件(如液压缸、液压马达):
液压缸通过油液压力推动活塞做直线运动(如驱动变桨叶片旋转、制动刹车片夹紧);
液压马达通过油液压力推动转子旋转,实现圆周运动(如驱动机舱偏航)。
此时,液压能重新转化为机械能,完成对机组部件的驱动。
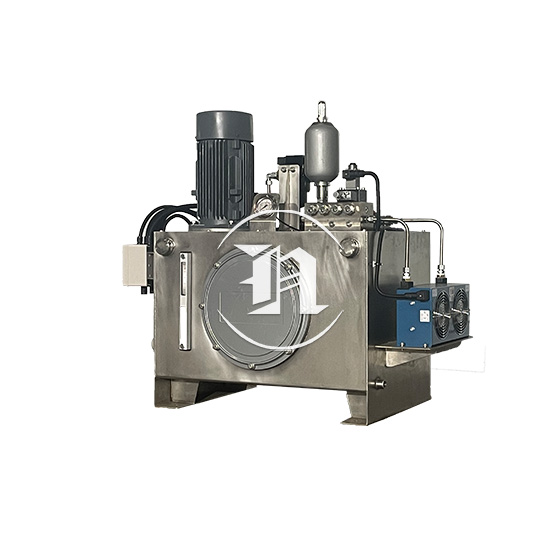
油液循环与辅助保障
执行元件排出的低压油通过回油管流回油箱,经滤油器过滤杂质、冷却器降温后,重新被液压泵吸入,形成闭环循环。蓄能器等辅助元件可在系统压力波动时储存或释放油液,稳定系统压力,确保动作平稳。

二、关键功能模块的工作原理
1. 变桨系统液压控制原理
变桨系统通过调节叶片角度,实现风能捕获效率优化或紧急顺桨(限速),其液压驱动原理如下:
正常运行时:控制器根据风速 / 功率信号输出电指令,比例阀接收信号后调节进入变桨油缸的油量和压力。油缸活塞杆伸缩,通过机械连杆带动叶片旋转至目标角度(如风速低时增大迎角,风速高时减小迎角)。
紧急顺桨时:若风速过高或系统故障,控制器触发紧急信号,电磁换向阀快速切换油路,蓄能器释放高压油推动油缸,使叶片迅速旋转至顺桨位置(迎角接近 0°),风轮转速降低,避免超速。
2. 偏航系统液压控制原理
偏航系统用于调整机舱方向,使风轮正对风向,液压系统的作用是驱动偏航动作和维持制动:
偏航驱动:液压马达接收高压油后旋转,通过齿轮传动机构带动机舱缓慢转动(跟踪风向)。换向阀控制马达的正反转,实现机舱的左右偏航。
偏航制动:当机舱调整至目标方向后,液压系统通过减压阀降低制动油缸的压力,刹车片在弹簧力作用下夹紧制动盘,固定机舱位置;再次偏航时,系统升高压力推动油缸松开刹车片,解除制动。
3. 制动系统液压控制原理
制动系统用于机组紧急停机(如故障或维护时),分为主轴制动和高速轴制动,原理类似:
正常运行时,制动油缸内充满低压油,刹车片与制动盘分离;
紧急停机时,控制器触发电磁换向阀,油缸内的油液通过溢流阀快速泄压,刹车片在弹簧力(或蓄能器压力)作用下迅速夹紧制动盘,通过摩擦力迫使风轮或主轴停止转动。
三、核心控制逻辑:闭环反馈调节
液压系统的精准运行依赖传感器 - 控制器 - 执行元件的闭环反馈:
传感器(如压力传感器、位移传感器、转速传感器)实时监测系统压力、叶片角度、机舱位置等参数;
控制器(如 PLC)将实测值与目标值对比,计算偏差后输出控制信号(如电压信号);
控制元件(如比例阀)根据信号调整油液参数,驱动执行元件动作,直至实测值与目标值一致,形成动态平衡。
例如,变桨控制中,位移传感器检测叶片角度,若偏离目标角度,控制器通过比例阀调节油缸油量,直至叶片角度回归设定值。