沈阳诺德尔自动化科技有限公司
Shenyang Ndeer Automation Technology Co., Ltd
Shenyang Ndeer Automation Technology Co., Ltd

联系人:谢经理
手 机:18640057795(v同步)
邮 箱:xs@syndeer.com
地 址:http://www.ndeeryy.com
网 址:沈阳市沈河区长青街35号
一、核心工作原理概述
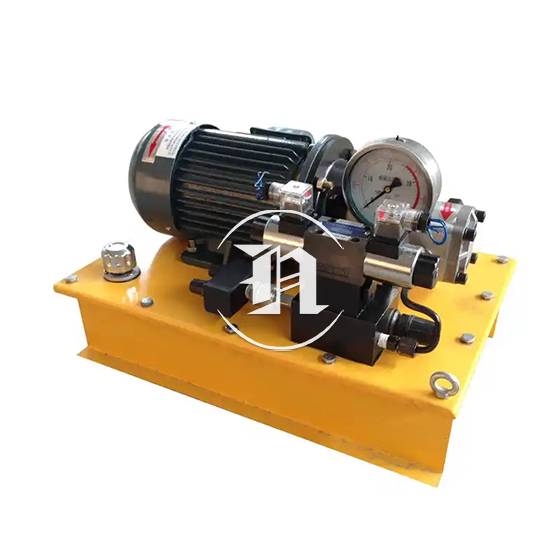
液压系统以液压油为介质,通过液压泵将电机的机械能转化为压力能,再通过管路将压力油输送至液压缸或液压马达,最终将压力能转化为机械能,驱动排土机的臂架俯仰、回转、卸料臂伸缩等动作。其本质是 “能量传递 + 精准控制” 的过程。
二、具体工作流程解析
1. 动力生成与传输
液压泵吸油:电机带动液压泵(如柱塞泵)旋转,泵从油箱吸油,通过叶轮或柱塞的运动将油液加压。
压力油输送:高压油经管路(需耐压、抗振动)输送至各执行元件回路,管路中设置过滤器(如吸油过滤器、回油过滤器),防止杂质污染系统。
2. 执行元件动作控制(以臂架俯仰为例)
臂架抬起:
① 操作人员通过控制手柄或 PLC 系统发出 “抬臂” 指令,换向阀切换至抬臂工位,高压油经换向阀进入俯仰液压缸的无杆腔(活塞大端腔)。
② 液压油推动活塞伸出,活塞杆带动臂架绕铰接点向上转动,有杆腔的油液经换向阀流回油箱。
臂架下降:
① 换向阀切换至降臂工位,高压油进入液压缸有杆腔(活塞小端腔)。
② 活塞缩回,臂架在自重作用下下降,无杆腔油液回流油箱。
3. 速度与力的调节机制
速度控制:通过流量控制阀(如节流阀、调速阀)调节进入执行元件的油液流量。流量越大,液压缸活塞运动速度越快,臂架俯仰或回转速度越高。
力的控制:系统压力由负载决定(如臂架重量、岩土阻力),但最大压力受溢流阀限制。例如,当臂架抬起时,负载越大,系统压力越高,但溢流阀设定最高压力(如 30MPa),超过时油液回流油箱,防止元件过载。
4. 多动作协同控制
排土机需同时控制臂架俯仰、回转、卸料臂伸缩等多个动作,液压系统通过以下方式实现协同:
油路分流:通过多路阀将高压油分配至不同执行元件回路,各回路独立控制。
同步控制:对精度要求高的动作(如双臂架同步俯仰),采用同步阀或比例阀调节流量,确保动作一致性。

三、安全保护与能量损耗控制
过载保护:溢流阀始终监控系统压力,避免因负载突变(如岩土卡滞)导致元件损坏。
防冲击设计:在换向阀或执行元件进出口设置缓冲阀,减少换向时的液压冲击,避免管路振动或元件损伤。
能量回收:部分高端排土机液压系统配备能量回收装置(如液压马达制动时将动能转化为液压能储存在蓄能器中),提高能源利用率。
四、与自动化系统的集成
现代排土机液压系统通常与 PLC(可编程逻辑控制器)、传感器集成,实现智能化控制:
传感器实时监测:压力传感器监测各回路压力,位移传感器反馈臂架角度,温度传感器监控油温,数据实时传输至 PLC。
自动调节逻辑:PLC 根据传感器数据自动调整比例阀开度,例如当臂架负载增加时,自动增大液压泵输出压力,保证动作平稳;当油温超过阈值时,启动冷却器风扇。